

我可以在英国使用 Quotex 吗? 您需要知道的一切
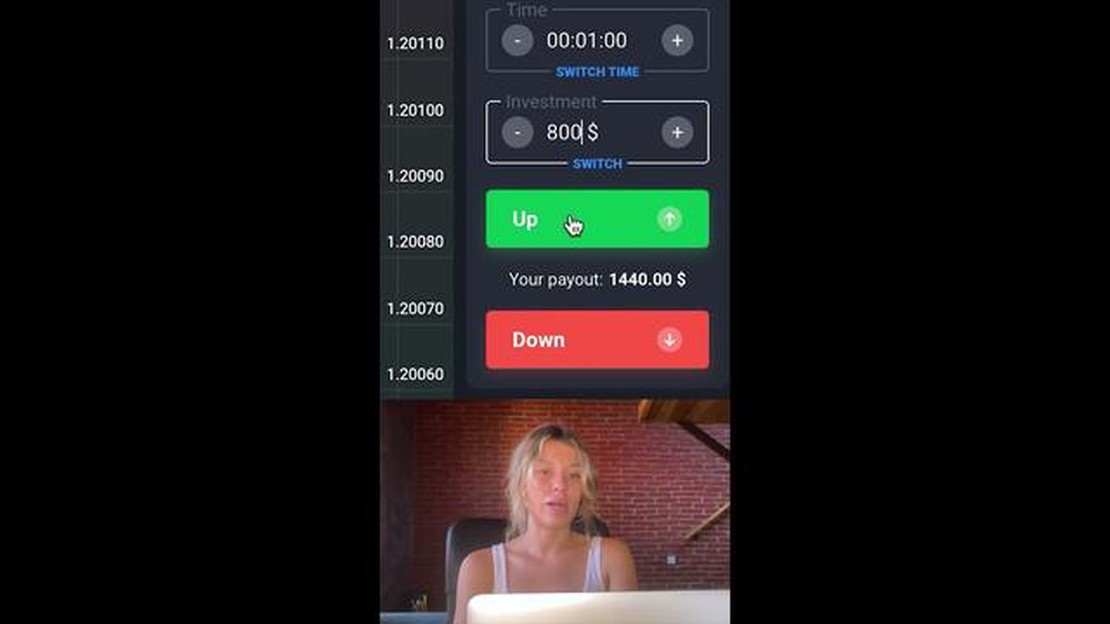
在英国使用 Quotex: 您需要了解的一切 Quotex是一个在线交易平台,因其操作简单、界面友好而风靡全球。 各国交易者纷纷涌入该平台,以利用其功能和潜力获取经济收益。 但是,如果您身在英国,您可能想知道在您的国家是否可以合法使用 Quotex。 好消息是,英国的交易者确实可以使用Quotex。 …
阅读文章

卡尔曼滤波法和移动平均法*是信号处理和时间序列分析中常用的两种技术,用于根据过去的观测结果预测未来值。 虽然这两种方法各有利弊,但重要的是要了解它们之间的区别,以确定哪种方法更适合特定任务。
卡尔曼滤波法是一种使用一系列随时间推移而观察到的测量值来估计未知变量的算法。 在测量存在不确定性或噪声的情况下,这种算法尤为有效。 卡尔曼滤波器*在计算新的估计值时,会同时考虑当前的测量值和之前的估计值,从而获得更准确的预测结果。
另一方面,移动平均法是一种简单的方法,可计算给定时间段内一组数据点的平均值。 这种方法简单明了,可以平滑数据,消除短期波动。 不过,它没有考虑数据的任何动态变化或趋势,在某些情况下会限制其准确性。
总之,在卡尔曼滤波法和移动平均法之间做出选择取决于手头任务的具体要求。 如果重点是在存在噪声或不确定性的情况下进行准确预测,一般首选卡尔曼滤波器。 但是,如果目标是获得简单快速的数据近似值,移动平均法可能是一个合适的选择。
归根结底,在选择这两种方法时,必须考虑数据的具体特征、所需的精度水平以及计算复杂度限制。 通过仔细评估这些因素,可以确定哪种技术能为特定应用提供最可靠、最有效的结果。
卡尔曼滤波器是动态系统中状态估计和跟踪的强大工具。 与其他滤波技术相比,卡尔曼滤波器有以下几个优点:
尽管卡尔曼滤波器有很多优点,但它也有一些局限性:
 2. 初始化和调整: 卡尔曼滤波器的性能在很大程度上取决于初始状态估计及其参数的调整。 不正确的初始化或不恰当的调整会导致估计精度低下。
3. 计算复杂度: 虽然卡尔曼滤波器的计算效率很高,但其计算复杂度会随着系统维度的增加而增加,因此不太适合高维问题。
4. 不确定性建模: 卡尔曼滤波器假定系统动态和测量噪声是已知的。 然而,在实际应用中,这些参数往往不确定或难以准确估计,从而导致估计错误。
2. 初始化和调整: 卡尔曼滤波器的性能在很大程度上取决于初始状态估计及其参数的调整。 不正确的初始化或不恰当的调整会导致估计精度低下。
3. 计算复杂度: 虽然卡尔曼滤波器的计算效率很高,但其计算复杂度会随着系统维度的增加而增加,因此不太适合高维问题。
4. 不确定性建模: 卡尔曼滤波器假定系统动态和测量噪声是已知的。 然而,在实际应用中,这些参数往往不确定或难以准确估计,从而导致估计错误。
总之,卡尔曼滤波器是一种功能强大、应用广泛的滤波技术,但也并非没有局限性。 在决定使用卡尔曼滤波器或探索其他滤波方法之前,必须仔细考虑系统的具体特点和要求。
另请阅读: 哪种工具最适合联属营销? 比较并选择合适的工具
移动平均法是时间序列分析和预测中常用的方法。 它有几个主要优点,也有一些局限性。
优点:
1. 简单: 移动平均法是一种直接的方法,不需要复杂的数学计算。 它易于理解和实施,因此不同专业水平的用户都可以使用。
2. 平滑性: 移动平均法通过平均波动来消除时间序列数据中的噪声。 它有助于识别潜在的趋势,对数据的可视化和分析非常有用。
另请阅读: 逐步指南: 轻松交易指数期货和期权
3. 灵活性: 移动平均法可应用于各种类型的时间序列数据,包括股票价格、经济指标和天气数据。 它可以根据不同的时间间隔和窗口大小进行调整,从而灵活捕捉短期或长期趋势。
4. 滞后效应: 移动平均法有助于发现数据中并不明显的趋势和变化。 通过考虑一系列过去的观察结果,移动平均法可以更平滑地表示数据,并突出重要的模式。
缺点:
1. 滞后: 移动平均法基于过去的数据,因此会滞后于实际趋势。 它不适合用于实时分析或即时预测,因为它可能无法捕捉数据中的突然变化或异常值。
2. 信息丢失: 移动平均法会将数据平均化,从而导致信息丢失。 它可能无法捕捉到原始数据的细节或细微差别,因此不太适合某些类型的分析或预测任务。
3. 对异常值的敏感性: 移动平均法对数据中的异常值或极端值很敏感。 一个离群值就能严重影响移动平均值并扭曲趋势。 因此,必须适当处理离群值,以避免产生误导性结果。
4. 同等权重: 移动平均法对所有过去的观测值给予同等权重,无论其相关性或重要性如何。 当过去的观测值具有不同程度的重要性,或者当基础数据具有季节性或周期性模式时,这可能会导致不理想的结果。
总之,移动平均法是一种简单灵活的时间序列数据分析方法。 它提供了数据的平滑表示,有助于识别趋势。 然而,它也有一些局限性,如滞后于实际趋势、信息丢失、对异常值的敏感性以及对过去观测数据的等权处理。 根据数据的具体要求和特征,移动平均法可能是一个合适的选择,也可以探索卡尔曼滤波法等替代方法。
卡尔曼滤波器是一种递归算法,用于在有噪声测量的情况下估计系统状态。
移动平均法是一种数学技术,通过对完整数据集的不同子集创建一系列平均值来分析数据点。
卡尔曼滤波器最适用于测量结果有噪声,而又想估计系统真实状态的情况。
移动平均法适用于需要平滑噪声数据并强调随时间变化的整体趋势的情况。
卡尔曼滤波器和移动平均法之间的选择取决于具体应用和所需结果。 如果需要根据噪声测量来估计系统的真实状态,那么卡尔曼滤波器是更好的选择。 但是,如果你只是想平滑噪声数据并关注整体趋势,那么移动平均法会是更好的选择。
卡尔曼滤波器是一种数学算法,用于估计系统的未知状态。 它的工作原理是根据对未来状态的测量和预测,递归更新对当前状态的估计。
移动平均法是一种统计技术,通过对完整数据集的不同子集创建一系列平均值来分析数据点。 它通常用于平滑数据波动并识别趋势或模式。

在英国使用 Quotex: 您需要了解的一切 Quotex是一个在线交易平台,因其操作简单、界面友好而风靡全球。 各国交易者纷纷涌入该平台,以利用其功能和潜力获取经济收益。 但是,如果您身在英国,您可能想知道在您的国家是否可以合法使用 Quotex。 好消息是,英国的交易者确实可以使用Quotex。 …
阅读文章
XM 是否接受 Neteller? Neteller 是一种流行的电子钱包,允许用户轻松安全地在线转账。 它被许多在线商户广泛接受,包括金融业领先的经纪商XM。 XM 向客户提供一系列存款选项,包括使用 Neteller 存款。 这种便捷的支付方式允许交易者快速向其 XM 交易账户充值。 …
阅读文章
了解 ECN 外汇经纪商: 它们如何运作以及提供哪些服务 在外汇市场上进行交易时,拥有一个可靠、透明的经纪商可以让一切变得不同。 ECN外汇经纪商是一种在经验丰富的交易者中越来越受欢迎的经纪商。 ECN 是 Electronic Communication Network(电子通信网络)的缩写,指的 …
阅读文章
有多少交易系统? 交易系统是金融市场的重要组成部分,为交易者提供了分析和执行交易的系统方法。 交易系统种类繁多,每种系统都有自己独特的方法和规则。 在本综合指南中,我们将探讨现有的各种交易系统,并深入研究它们的优缺点和流行策略。 趋势跟踪是最常见的交易系统类型之一。 顾名思义,这些系统旨在识别和利用 …
阅读文章
探索 20 EMA 50 EMA 策略及其优势 20 EMA 50 EMA 策略是一种流行的交易策略,它利用两条移动平均线来识别潜在的交易机会。 该策略基于 “移动平均线 “的概念,“移动平均线 “是交易中用于平滑价格数据和识别趋势的技术指标。 在该策略中,20 EMA(指数移动平均线)和 50 …
阅读文章
了解布林线交叉的含义 布林线是约翰-布林(John Bollinger)开发的一种技术分析工具,可为市场波动和潜在的价格反转提供有价值的见解。 通过结合使用简单移动平均线和标准偏差,布林线在价格图表周围创建了一个动态通道。 该通道可帮助交易者识别超买和超卖情况,并检测市场趋势的变化。 目录 布林线交 …
阅读文章



