


Розуміння податку на прибуток в Румунії: Вичерпний посібник
Податок на прибуток в Румунії: все, що вам потрібно знати Прибутковий податок є важливим аспектом румунської податкової системи, що впливає як на …
Прочитати статтю
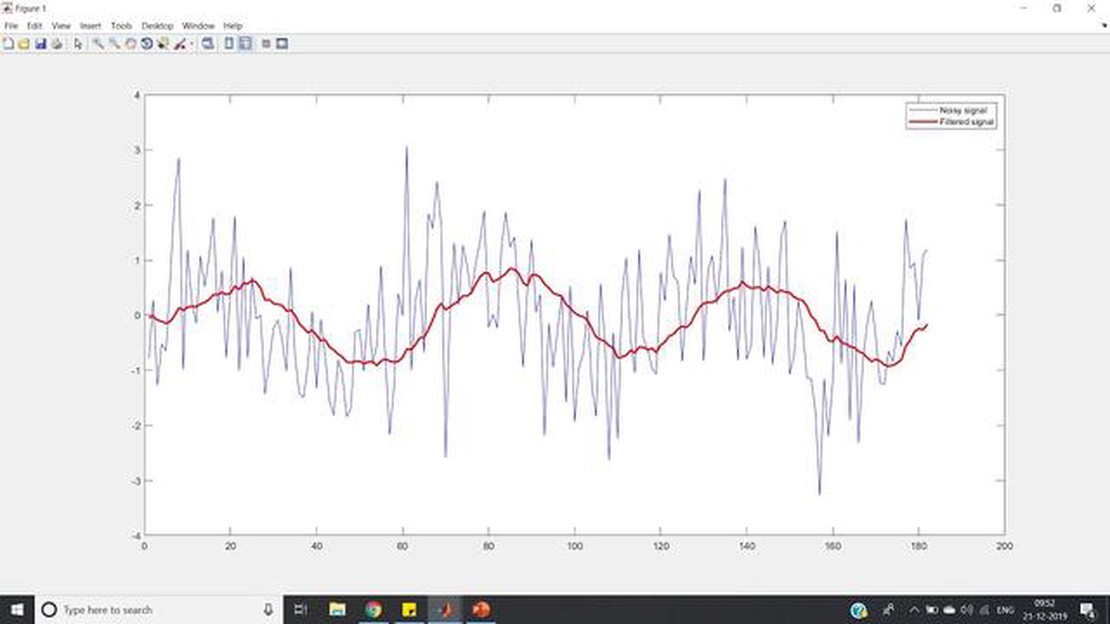
Цифрова обробка сигналів (ЦОС) відіграє важливу роль у галузі електроніки та комунікаційної техніки. Одним з фундаментальних понять в ЦОС є фільтр ковзного середнього. Фільтр ковзного середнього - це загальний метод, який використовується для згладжування шуму в сигналі або для виділення важливих характеристик із зашумленого сигналу. Matlab, потужна мова програмування та середовище, пропонує широкий спектр функцій та інструментів для реалізації та аналізу фільтрів ковзного середнього.
По суті, фільтр ковзного середнього обчислює середнє значення підмножини послідовних відліків сигналу. Ця підмножина, відома як вікно, ковзає по сигналу, обчислюючи середнє значення відліків у межах вікна в кожній позиції. Розмір вікна визначає ступінь згладжування або фільтрації. Більший розмір вікна призводить до більш згладженого результату, але з більшою часовою затримкою. І навпаки, менший розмір вікна призводить до меншого згладжування і меншої часової затримки.
Щоб реалізувати фільтр ковзного середнього в Matlab, потрібно визначити розмір вікна і вибрати потрібний вхідний сигнал. Функція movmean може бути використана для обчислення ковзного середнього сигналу. Matlab також надає можливість вказати тип даних і граничні умови для обробки крайніх випадків вхідного сигналу. Після обчислення ковзного середнього його можна візуалізувати за допомогою функцій побудови графіків, таких як plot або stem, щоб краще зрозуміти ефект фільтрації.
Розуміння цифрової обробки сигналів за допомогою ковзного середнього в Matlab є важливою навичкою для інженерів та науковців, які працюють з сигналами та даними. Використовуючи можливості Matlab, можна легко реалізовувати та аналізувати фільтри ковзного середнього, витягуючи цінну інформацію з зашумлених сигналів та покращуючи загальну якість додатків для обробки сигналів.
Загалом, оволодіння концепцією та реалізацією цифрової обробки сигналів за допомогою ковзного середнього в Matlab може значно розширити можливості інженера щодо маніпулювання та аналізу сигналів у різних сферах застосування.
Фільтр ковзного середнього - це широко використовувана техніка цифрової обробки сигналів (ЦОС), яку можна реалізувати в Matlab. Він використовується для згладжування зашумлених даних або даних, що коливаються, шляхом усереднення серії значень за заданим розміром вікна. Цей фільтр може бути корисним у різних додатках, таких як фінансове прогнозування, розпізнавання мови та обробка зображень.
Концепція фільтра ковзного середнього проста. Він бере серію вхідних значень і замінює кожне значення середнім значенням вхідних значень у визначеному вікні. Розмір вікна, також відомий як порядок фільтра, визначає кількість вхідних значень, що використовуються для процесу усереднення. Менший розмір вікна призводить до швидшого, але менш згладженого фільтрування, тоді як більший розмір вікна призводить до повільнішого, але більш вираженого згладжування.
Реалізація фільтра ковзного середнього в Matlab передбачає використання функції “conv”, яка виконує згортку між вхідними даними і ядром фільтра. Ядро фільтра - це просто масив коефіцієнтів, який визначає вагу, присвоєну кожному вхідному значенню. Для фільтра ковзного середнього ядро містить рівні ваги для всіх вхідних значень в межах розміру вікна.
Після застосування фільтра ковзного середнього до вхідних даних, відфільтрований результат отримується шляхом відкидання початкового та кінцевого розмірів вікна, оскільки вони можуть не містити повних даних для усереднення. Відфільтрований результат матиме ту саму довжину, що й вхідні дані, а кожне значення представлятиме середнє значення відповідних вхідних даних у вікні.
Важливим моментом при використанні фільтра ковзного середнього є вибір розміру вікна. Як згадувалося раніше, менші розміри вікон призводять до швидшого, але менш згладженого фільтрування, тоді як більші розміри вікон призводять до повільнішого, але більш вираженого згладжування. Важливо вибрати відповідний розмір вікна, виходячи з характеристик вхідних даних і бажаного рівня згладжування.
Читайте також: Чи законна пірамідальна торгівля: посібник для розуміння законності фінансових пірамід
На закінчення, фільтри ковзного середнього є потужним інструментом в DSP, який можна реалізувати за допомогою Matlab. Вони забезпечують простий і ефективний спосіб згладжування зашумлених або флуктуаційних даних, що робить їх корисними в різних додатках. Розуміючи концепцію фільтрів ковзного середнього та враховуючи відповідний розмір вікна, можна ефективно використовувати ці фільтри при програмуванні в Matlab.
Цифрова обробка сигналів (ЦОС) - це галузь науки та техніки, яка займається обробкою цифрових сигналів. Вона включає в себе аналіз, модифікацію та вилучення корисної інформації з цифрових сигналів для досягнення бажаних цілей. DSP має широкий спектр застосувань, від обробки аудіо та мови до обробки зображень і відео.
Читайте також: Найкращі індикатори з чіткими сигналами на купівлю та продаж для успішної торгівлі
Однією з фундаментальних концепцій DSP є представлення сигналу в цифровій області. У цифровій області аналоговий сигнал безперервного часу дискретизується і квантується для отримання дискретного амплітудного сигналу дискретного часу. Цей дискретний сигнал може бути оброблений за допомогою різних методів ЦОС.
Деякі з важливих методів, що використовуються в ЦОС, включають фільтрацію, модуляцію, демодуляцію та спектральний аналіз. Фільтрація передбачає видалення або послаблення певних частот сигналу, тоді як модуляція і демодуляція використовуються для передачі і прийому сигналу. Спектральний аналіз дозволяє аналізувати частотний склад сигналу та ідентифікувати його різні компоненти.
Одним з ключових елементів в DSP є використання математичних інструментів і алгоритмів для обробки сигналів. Існують різні математичні методи і техніки, такі як аналіз Фур’є, згортка і кореляція, які використовуються для аналізу і маніпулювання цифровими сигналами. Ці математичні інструменти забезпечують міцну основу для розуміння та реалізації алгоритмів ЦОС.
Ще однією важливою концепцією в DSP є використання цифрових фільтрів. Цифровий фільтр - це система, яка змінює частотний склад сигналу. Його можна використовувати для видалення шуму з сигналу, посилення певних частотних компонентів або виконання інших бажаних операцій. Цифрові фільтри можуть бути реалізовані за допомогою різних методів, таких як фільтри з кінцевою імпульсною характеристикою (FIR) і фільтри з нескінченною імпульсною характеристикою (IIR).

Загалом, розуміння основ цифрової обробки сигналів є важливим для будь-кого, хто працює з цифровими сигналами. Він надає необхідні знання та методи для ефективної обробки та аналізу сигналів, що призводить до підвищення продуктивності та покращення результатів у різних додатках.
Фільтр ковзного середнього - це метод цифрової обробки сигналів, який усереднює групу сусідніх відліків сигналу для зменшення шуму або згладжування варіацій сигналу.
Фільтр ковзного середнього працює, беручи середнє значення з певної кількості попередніх відліків сигналу. Кількість відліків для усереднення визначається довжиною фільтра. На виході фільтра виходить середнє значення цих відліків. Потім фільтр переходить до наступного набору відліків і повторює процес.
Метою використання фільтра ковзного середнього є зменшення шуму в сигналі або згладжування варіацій сигналу. Це може бути корисно в тих випадках, коли сигнал містить небажані високочастотні компоненти або коли необхідно усунути невеликі коливання або сплески в сигналі.
До переваг використання фільтра ковзного середнього можна віднести його простоту та ефективність у зменшенні шуму. Він також простий в реалізації і не вимагає складних математичних операцій. Однак фільтр ковзного середнього може вносити затримку у вихідний сигнал, і він може не підходити для застосувань, де потрібен високий ступінь точності. Крім того, він може бути неефективним у видаленні певних типів шуму або варіацій сигналу.

Податок на прибуток в Румунії: все, що вам потрібно знати Прибутковий податок є важливим аспектом румунської податкової системи, що впливає як на …
Прочитати статтю
Який розмір баликбаяна? Коробка балікбаян - це популярний спосіб, який використовують філіппінці, що живуть за кордоном, для відправки товарів і …
Прочитати статтю
Чи вигідна автоматична торгівля? В останні роки автоматична торгівля стає все більш популярною серед трейдерів та інвесторів. Автоматизована торгівля, …
Прочитати статтю
Розрахунок страйкової ціни для ESOP: Комплексний посібник Плани участі працівників у власності на акції (ESOP) - це популярний спосіб надання …
Прочитати статтю
Типові помилки на Форекс: Уникайте цих помилок, щоб покращити свою торгівлю **Торгівля на ринку Форекс, також відома як торгівля іноземною валютою, є …
Прочитати статтю
Розуміння ризиків фондових опціонів: Чи справді вони безризикові? Фондові опціони вже давно вважаються популярною і прибутковою інвестиційною …
Прочитати статтю



