

Python'da EWM Fonksiyonunu Keşfetmek: Kapsamlı Bir Kılavuz
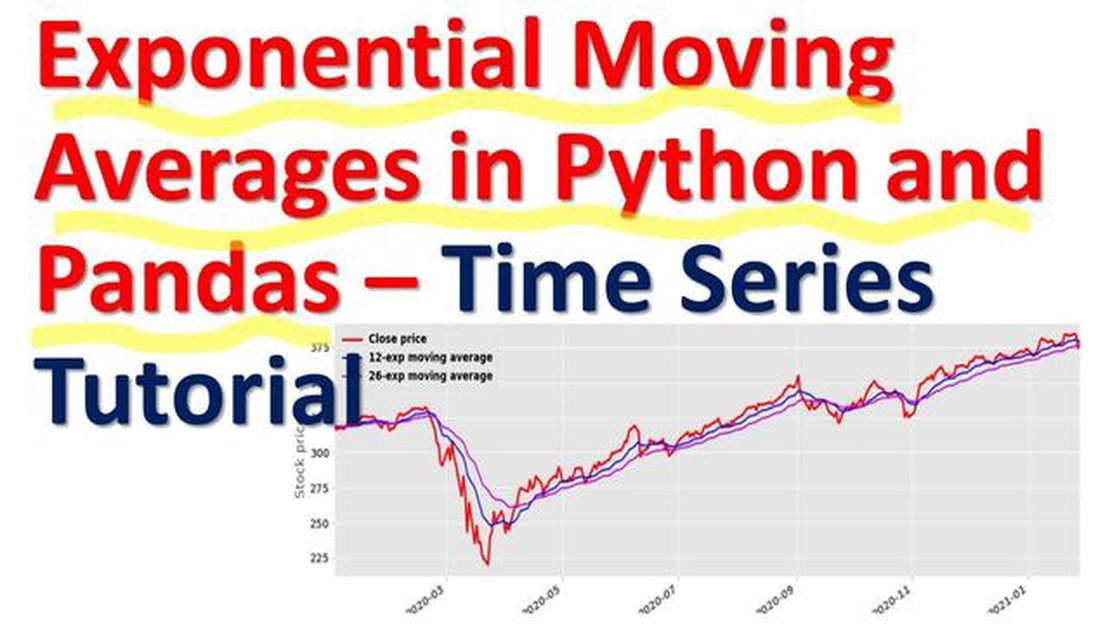
Python’da EWM Fonksiyonunu Anlama Zaman serisi verileriyle çalışıyorsanız veya Python’da üstel ağırlıklı hareketli ortalamalar (EWM) hesaplamaları …
Makaleyi Oku
Sinyal işleme alanında, veri yumuşatma ve gürültü azaltma için kullanılan çeşitli yöntemler vardır. Yaygın olarak kullanılan iki teknik Hareketli Ortalama ve Savitzky-Golay Filtresidir. Her iki yöntem de benzer sonuçlar elde etmeyi amaçlasa da, aralarında anlaşılmaya değer önemli farklar vardır.
Hareketli Ortalama, belirli bir pencere içindeki bir dizi veri noktasının ortalamasını hesaplayan basit ve sezgisel bir filtredir. Bu pencere veriler arasında kayar ve her konumdaki ortalama değer, o konumdaki düzleştirilmiş değer haline gelir. Bu yöntem yüksek frekanslı gürültüyü azaltmada etkilidir, ancak keskin geçişleri bulanıklaştırabilir ve filtrelenmiş sinyalde gecikmeye neden olabilir.
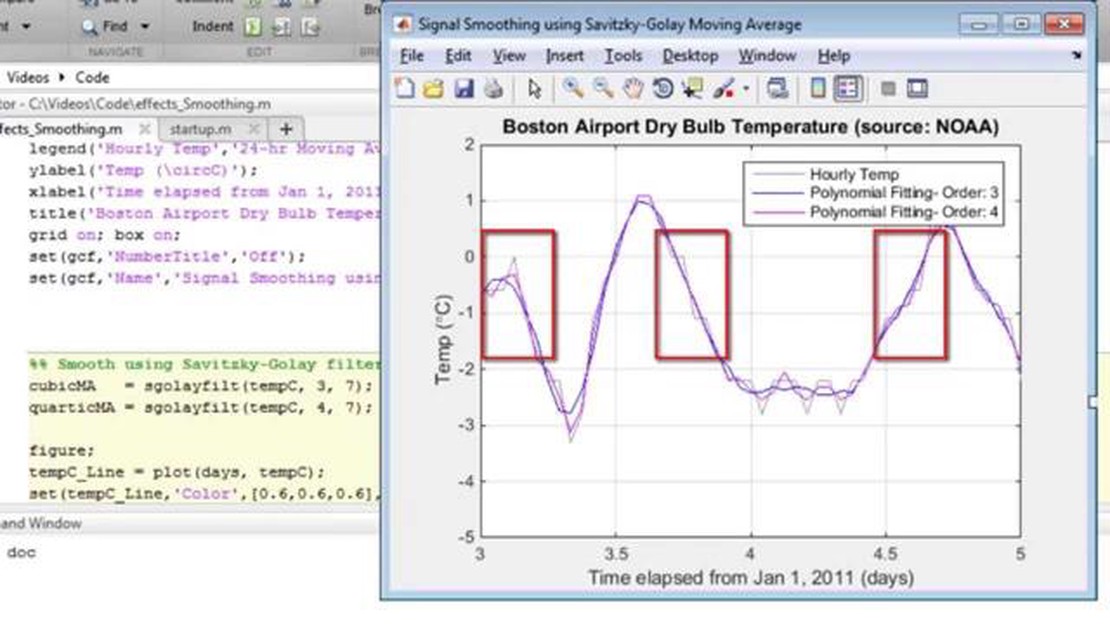
Öte yandan Savitzky-Golay Filtresi, verileri düzeltmek için polinom uydurmayı kullanan daha gelişmiş bir tekniktir. Ortalamayı hesaplamak için sabit bir pencere kullanmak yerine, bu filtre verilerin küçük bir bölümüne bir polinom fonksiyonu uydurur ve bu fonksiyon daha sonra her noktada yumuşatılmış değeri tahmin etmek için kullanılır. Hareketli Ortalamanın aksine Savitzky-Golay Filtresi, gürültüyü etkili bir şekilde azaltırken verilerdeki ayrıntıları ve keskin kenarları koruyabilir.
İki yöntem arasındaki bir diğer önemli fark, farklı gürültü türlerini ele alma yeteneklerinde yatmaktadır. Hareketli Ortalama rastgele gürültü için uygun olsa da, sistematik gürültü modelleriyle mücadele edebilir. Savitzky-Golay Filtresi ise hem rastgele hem de sistematik gürültüyle başa çıkabilir, bu da onu birçok durumda daha çok yönlü bir seçenek haline getirir.
Sonuç:
Hem Hareketli Ortalama hem de Savitzky-Golay Filtresi sinyal işlemede değerli araçlardır, ancak onları farklı senaryolar için uygun kılan farklı özelliklere sahiptirler. Hareketli Ortalama basit ve etkilidir, ancak ayrıntıları bulanıklaştırabilir ve gecikmeye neden olabilir. Öte yandan Savitzky-Golay Filtresi, gürültüyü azaltırken ayrıntıları koruyabilir ve bu da onu daha çok yönlü bir seçenek haline getirir. Bu yöntemler arasındaki farkları anlamak, belirli bir uygulama için en uygun filtreyi seçmek söz konusu olduğunda daha iyi karar vermeyi sağlar.
Genellikle MA filtresi olarak kısaltılan hareketli ortalama filtresi, bir dizi bitişik veri noktasının ortalamasını hesaplayarak verilerdeki dalgalanmaları düzelten yaygın olarak kullanılan bir sinyal işleme tekniğidir. Hareketli ortalama filtresinin, zamanın her noktasında verilerin bir alt kümesinin ortalamasını alarak bir veri kümesindeki eğilimi veya modeli tahmin edebileceği ilkesine dayanır.
Hareketli ortalama filtresi, bir zaman serisi veri seti boyunca sabit boyutta bir pencereyi kaydırarak çalışır. Her adımda, filtre pencere içindeki veri noktalarının ortalamasını hesaplar ve merkezi değeri bu ortalama ile değiştirir. Filtrenin sırası olarak da bilinen pencere boyutu, hesaplamada dikkate alınan bitişik veri noktalarının sayısını belirler. Daha büyük bir pencere boyutu daha düzgün bir çıktı ile sonuçlanırken, daha küçük bir pencere boyutu orijinal verilerin daha fazla detayını korur.
Hareketli ortalama filtresi finans, ekonomi ve mühendislik gibi çeşitli alanlarda yaygın olarak kullanılmaktadır. Genellikle gürültüyü gidermek veya hisse senedi fiyatları, ekonomik göstergeler veya sensör ölçümleri gibi zaman serisi verilerindeki dalgalanmaları düzeltmek için uygulanır. Filtre, daha fazla analizden önce bir ön işleme adımı olarak veya veri görselleştirme veya trend analizi için bağımsız bir araç olarak kullanılabilir.
Hareketli ortalama filtresinin avantajlarından biri basitliği ve uygulama kolaylığıdır. Karmaşık matematiksel hesaplamalar gerektirmez ve farklı teknik uzmanlık seviyelerine sahip kişiler tarafından kolayca anlaşılabilir ve kullanılabilir. Ayrıca hareketli ortalama filtresi, pencere boyutu gürültü azaltma ve verilerdeki önemli özellikleri koruma arasında denge kuracak şekilde ayarlanabildiği için esnek bir yaklaşım sağlar.
Bununla birlikte, hareketli ortalama filtresinin de sınırlamaları vardır. Filtrelenmiş veride bir gecikme yaratabilir, yani filtrelenmiş çıktı orijinal girdiye kıyasla zaman içinde kaydırılır. Bu gecikme, gerçek zamanlı veya gerçek zamana yakın analiz gerektiren uygulamalarda sorun yaratabilir. Ayrıca filtre, pencere içindeki tüm veri noktalarını, bireysel ağırlıklarını veya önemlerini dikkate almadan eşit olarak ele aldığından, aykırı değerlere veya verilerdeki ani değişikliklere karşı hassastır.
Ayrıca Oku: Swing Ticareti için En İyi İpuçları ve Stratejiler - Swing Ticareti Yapmanın En Etkili Yolunu Keşfedin
Sonuç olarak, hareketli ortalama filtresi zaman serisi verilerini yumuşatmak ve analiz etmek için yaygın olarak kullanılan bir sinyal işleme tekniğidir. Gürültüyü gidermek ve bir veri setindeki eğilimi tahmin etmek için basit ve sezgisel bir yaklaşım sağlar. Sınırlamaları olsa da, tanımını ve uygulamasını anlamak, araştırmacıların ve uygulayıcıların veri analizi görevleri için uygun filtreyi seçerken bilinçli kararlar vermelerine yardımcı olabilir.
Savitzky-Golay filtresi, zaman serisi verilerinin yumuşatılması ve gürültü azaltılması için kullanılan bir dijital sinyal işleme tekniğidir. Veri noktalarından oluşan bir pencerenin ortalamasını hesaplayan hareketli ortalama filtresinin aksine Savitzky-Golay filtresi, verilerin altında yatan eğilimi tahmin etmek için en küçük kareler polinom uydurma algoritması kullanır.
Savitzky-Golay filtresi, kayan bir pencere içindeki verilere bir polinom fonksiyonu uydurarak gürültüyü etkili bir şekilde ortadan kaldırabilir ve sinyalin önemli özelliklerini koruyabilir. Filtre bunu, polinom katsayılarını, takılan polinom ile orijinal veri arasındaki en küçük kareler hatası en aza indirilecek şekilde tahmin ederek başarır.
Savitzky-Golay filtresinin çeşitli alanlarda çok sayıda uygulaması vardır. Sinyal işlemede, özellikle de gürültülü zaman serisi verilerinin analizinde yaygın olarak kullanılır. Rastgele dalgalanmalardan veya ölçüm hatalarından etkilenen sensörlerden veya cihazlardan gelen verileri düzeltmek için uygulanabilir.
Ayrıca Oku: Hareketli ortalama modeli nedir? | Açıklandı | [Web Sitenizin Adı]
Gürültü azaltmanın yanı sıra Savitzky-Golay filtresi türev tahmini için de kullanılabilir. Filtre, verilere yüksek dereceli bir polinom uydurarak her noktada sinyalin eğimini veya değişim oranını tahmin edebilir. Bu da filtreyi sinyal farklılaştırma, tepe tespiti ve tepe genişliği tahmini gibi uygulamalarda kullanışlı hale getirir.
Genel olarak Savitzky-Golay filtresi, zaman serisi verilerini yumuşatmak ve analiz etmek için güçlü bir araçtır. Önemli özellikleri korurken gürültüyü giderme yeteneği, onu bilimsel araştırmadan endüstriyel süreç izlemeye kadar çeşitli alanlarda değerli bir teknik haline getirir.
Hareketli ortalama filtresi, kayan bir pencere içinde belirli sayıda veri noktasının ortalamasını hesaplayarak bir veri kümesindeki rastgele gürültüyü filtreleyen yaygın olarak kullanılan bir dijital sinyal işleme tekniğidir.
Hareketli ortalama filtresi, veri seti üzerinde sabit boyutta bir pencere kaydırarak ve pencere içindeki veri noktalarının ortalamasını hesaplayarak çalışır. Bu pencere daha sonra veri seti boyunca hareket ettirilir ve her konum için yeni bir ortalama hesaplanır.
Hareketli ortalama filtresi kullanmanın avantajları arasında gürültü azaltma, verilerin yumuşatılması ve seçilen pencere boyutuna bağlı olarak belirli frekans bileşenlerini vurgulama veya bastırma yeteneği yer alır.
Savitzky-Golay filtresi, verileri yumuşatmak ve farklılaştırmak için kullanılan bir dijital filtre türüdür. En küçük kareler polinom uydurma yaklaşımına dayanır ve hareketli ortalama filtresine kıyasla gürültü azaltma ile sinyal koruma arasındaki denge üzerinde daha iyi kontrol sağlar.
Savitzky-Golay filtresi, basitçe veri noktalarının ortalamasını almak yerine en küçük kareler polinom uydurma yaklaşımını kullanması bakımından hareketli ortalama filtresinden farklıdır. Bu, gürültüyü azaltırken altta yatan sinyalin şeklini daha iyi korumasını sağlar.
Hareketli ortalama filtresi, belirli sayıda bitişik veri noktasının ortalamasını hesaplayarak bir zaman serisi verilerini düzeltmek için kullanılan bir tekniktir.
Hareketli ortalama filtresi, belirli bir boyuttaki bir pencereyi zaman serisi verileri boyunca kaydırarak, pencere içindeki veri noktalarının ortalamasını hesaplayarak ve merkezi veri noktasını hesaplanan ortalama ile değiştirerek çalışır.

Python’da EWM Fonksiyonunu Anlama Zaman serisi verileriyle çalışıyorsanız veya Python’da üstel ağırlıklı hareketli ortalamalar (EWM) hesaplamaları …
Makaleyi Oku
Özel bir şirket hisse senedi ihraç edebilir mi? Özel şirketler ya da yakından tutulan şirketler olarak da bilinen özel şirketler, hisselerinin açık …
Makaleyi Oku
Döviz Opsiyonları: Bir Örnek ve Açıklama Finans dünyasında döviz opsiyonları, dalgalanan döviz kurlarıyla ilişkili risklerin yönetilmesinde çok önemli …
Makaleyi Oku
Vintage Gümüş Nasıl Tanımlanır? Antika gümüş söz konusu olduğunda, koleksiyoncular ve meraklılar için en önemli hususlardan biri orijinalliğini tespit …
Makaleyi Oku
Skrill Hindistan’da yasal mı? Skrill, kullanıcıların uluslararası alanda hızlı ve güvenli bir şekilde para transferi yapmalarını sağlayan çevrimiçi …
Makaleyi Oku
Forex Alıntılarını Anlamak: Nasıl Okunur ve Yorumlanır Döviz piyasasında (forex) işlem yaparken, en önemli hususlardan biri kotasyonları anlamak ve …
Makaleyi Oku



